基于 YOLOv5 的无人机航拍目标检测
基于 YOLOv5 做无人机航拍小目标检测:加 P2 小目标检测头 + CBAM 注意力 + MixUp 增强逐层提升,对标 Faster R-CNN/SSD/DETR——带注释代码、技术文档、面试问答全配齐。
数据与任务
| 样本量 | VisDrone · 8629 图 · 10 类 |
|---|---|
| 核心方法 | YOLOv5 + P2/CBAM/MixUp |
| 技术栈 | PyTorch · Ultralytics |
如果你想找一个紧贴目标检测落地、又有清晰改进思路的项目,这个「YOLOv5 无人机航拍目标检测」很合适。
它面向航拍小目标这个真实难题,配套也给你备齐了,帮你真正搞懂它、在面试和答辩里讲明白:带中文注释、能读懂的代码,一份从背景讲到每步实现的技术文档,一份把面试问题连答案都写好的问答文档,还有一整套能直接做 PPT 的配图。
先说清楚,它到底在做什么
无人机航拍图里的目标又小又密、种类还多(行人、车辆、三轮车……),检测起来很难——大量目标只有 20×20 像素以下,一张图可能有几十上百个框。这正是通用检测器容易漏检的场景。
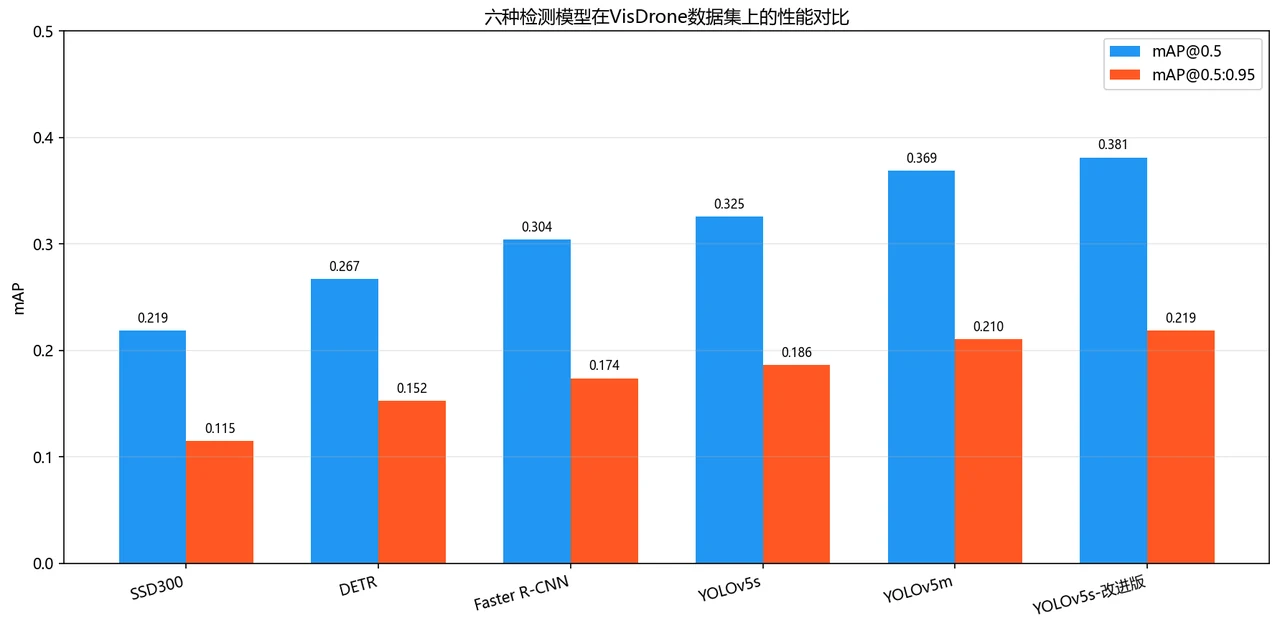
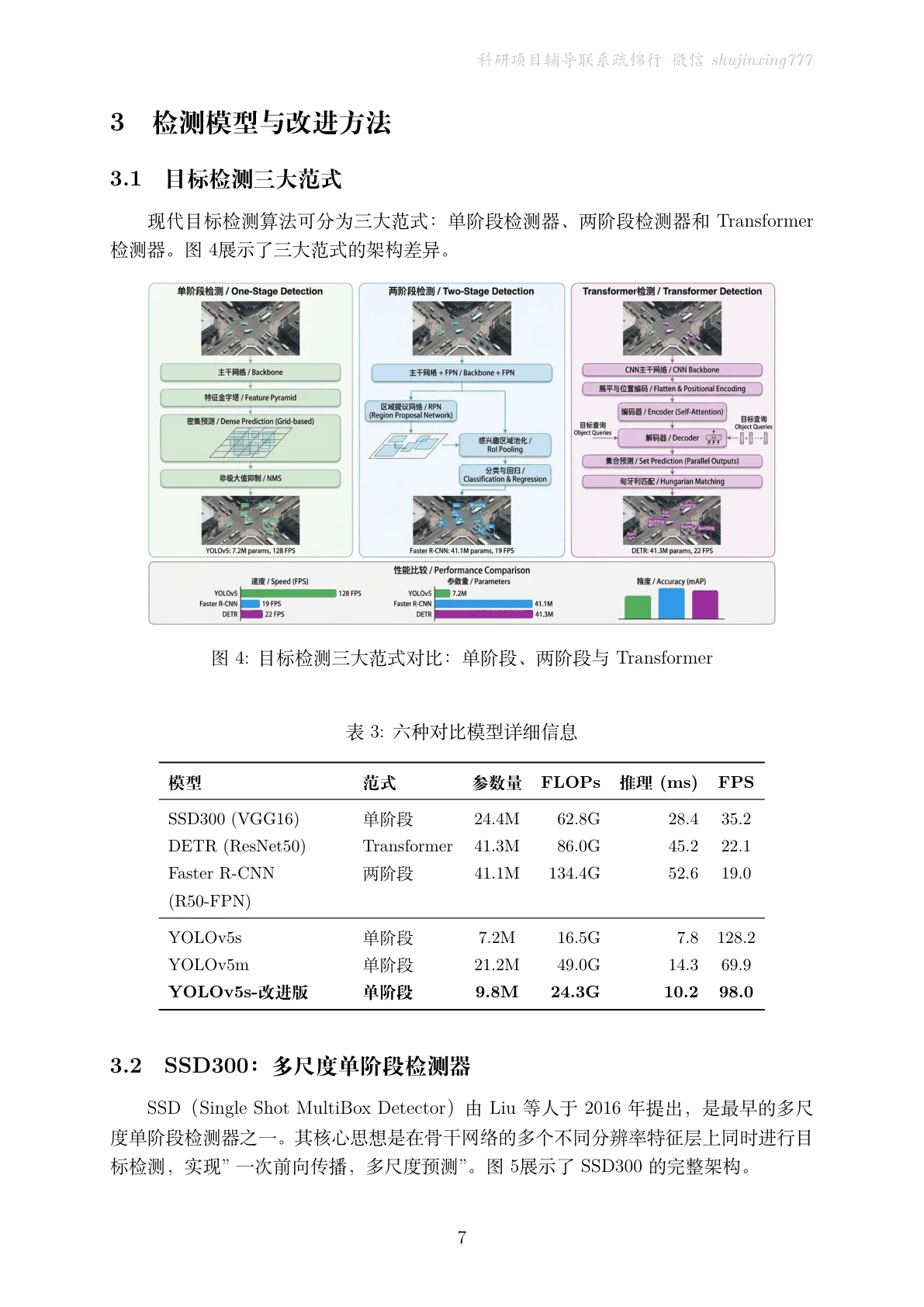
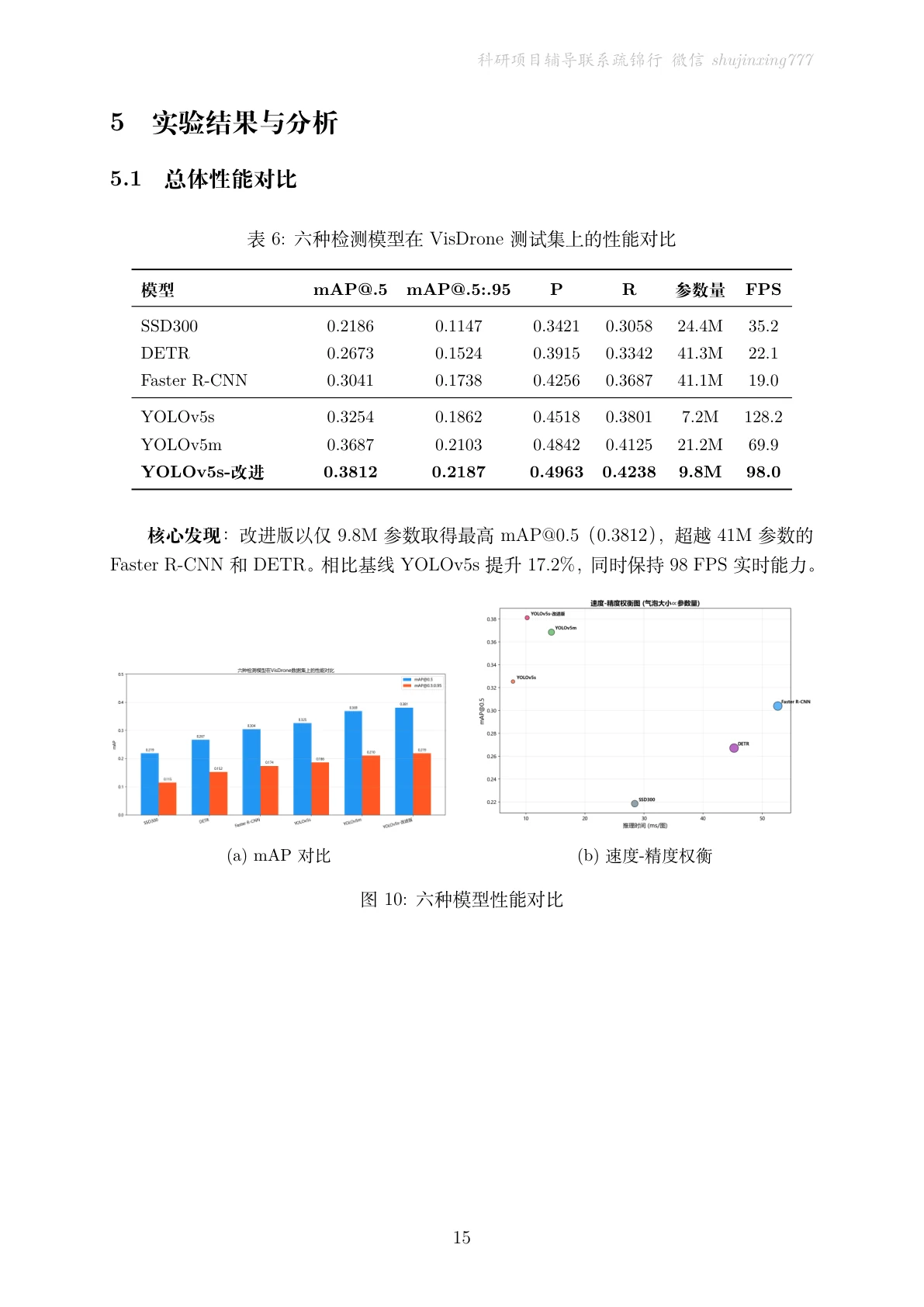
这个项目基于 YOLOv5,用"逐层递进改进"的方式专门优化航拍小目标:加一个 P2 小目标检测头直接处理微小目标、串入 CBAM 注意力增强特征判别、用 MixUp 数据增强提升密集遮挡场景的鲁棒性;还和 Faster R-CNN、SSD、DETR 三个经典检测器做了对标。

搞懂它,你能在面试里讲清楚什么
把下面几件事吃透,面试官顺着问下来你都能接得住。
P2 小目标检测头为什么有用。 YOLOv5 原生从 P3 开始,跳过了更浅、分辨率更高的 P2 层。加上 P2 后能直接覆盖 20×20 以下的微小目标。你能讲清楚它的原理,以及它在消融里带来的提升最大。
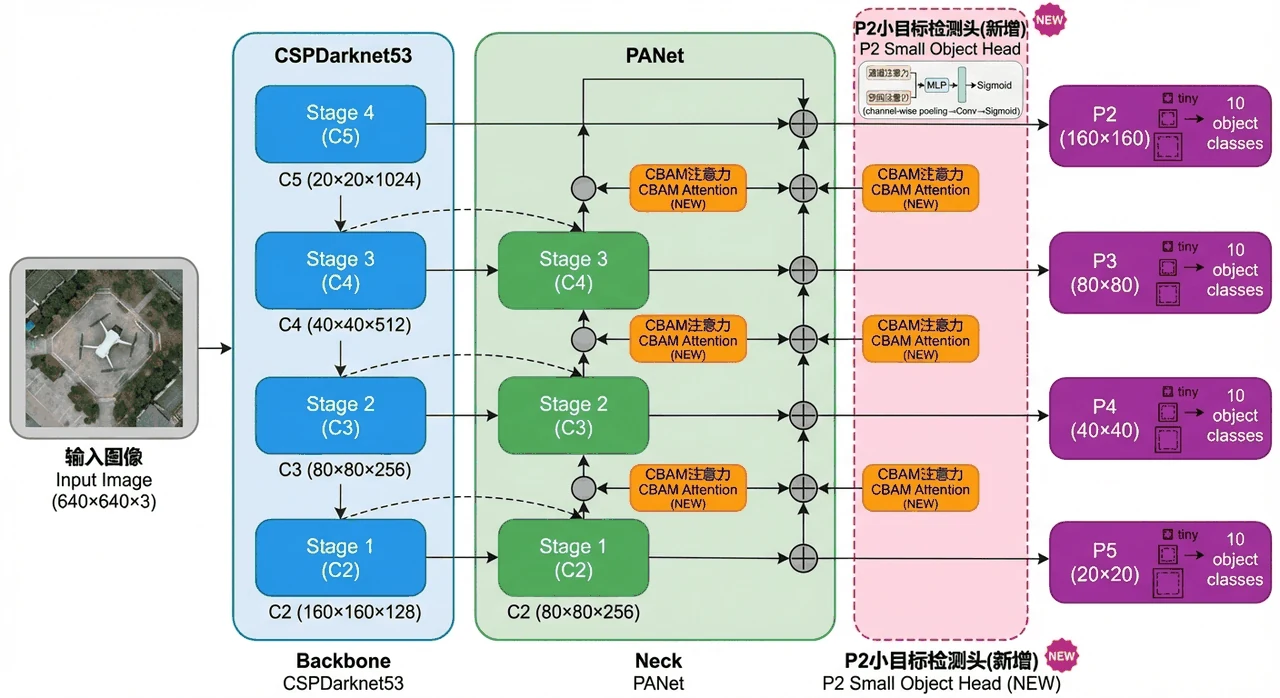
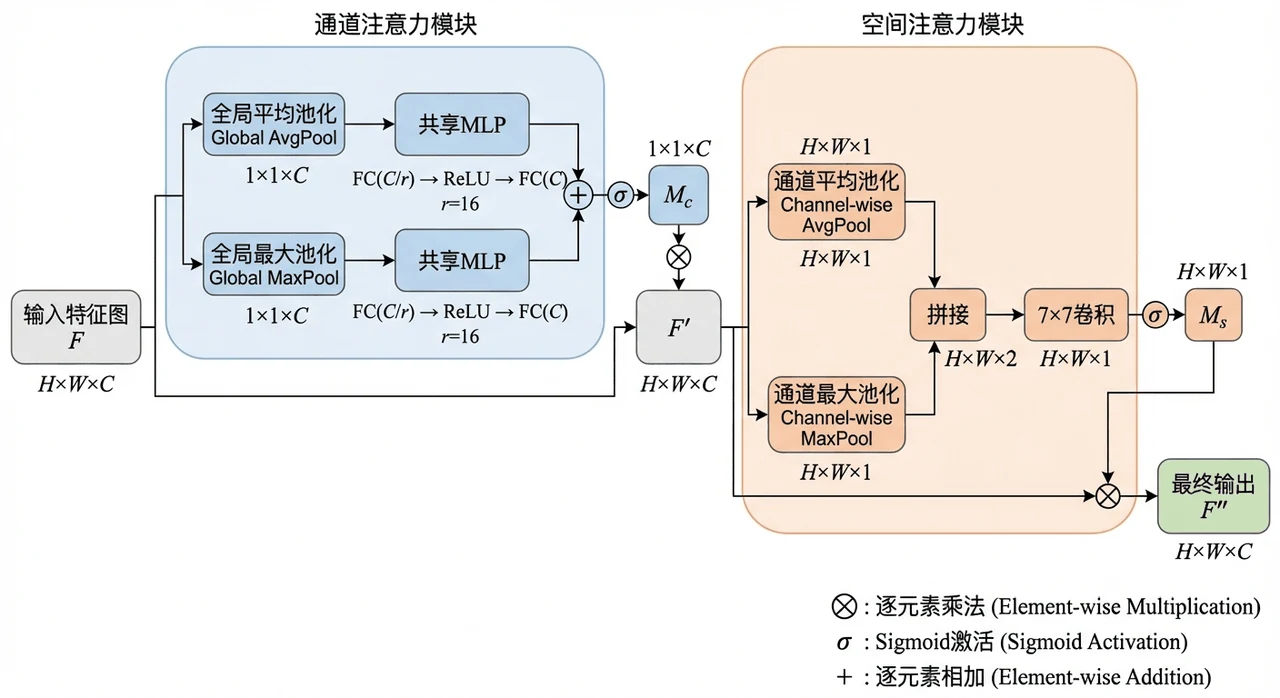
CBAM 注意力放在哪、为什么。 CBAM 从通道和空间两维度增强特征。你能讲清楚为什么放在颈部(Neck)而不是骨干——平衡精度和计算量。
怎么用消融和对标说清每个改进的价值。 项目逐个验证了 P2、CBAM、MixUp 的增益,还和两阶段检测器比了速度-精度权衡。这种"用数据说话"的思路很加分。
下面这组分析图也都给你做好了,可以直接放进答辩或面试 PPT:
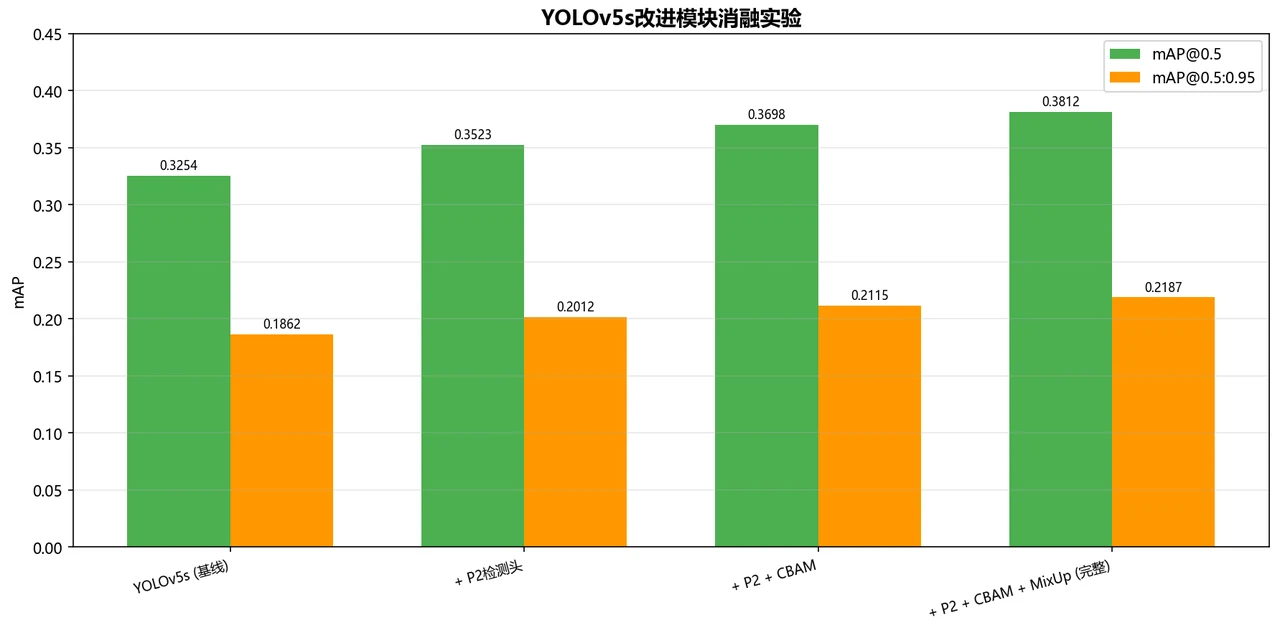
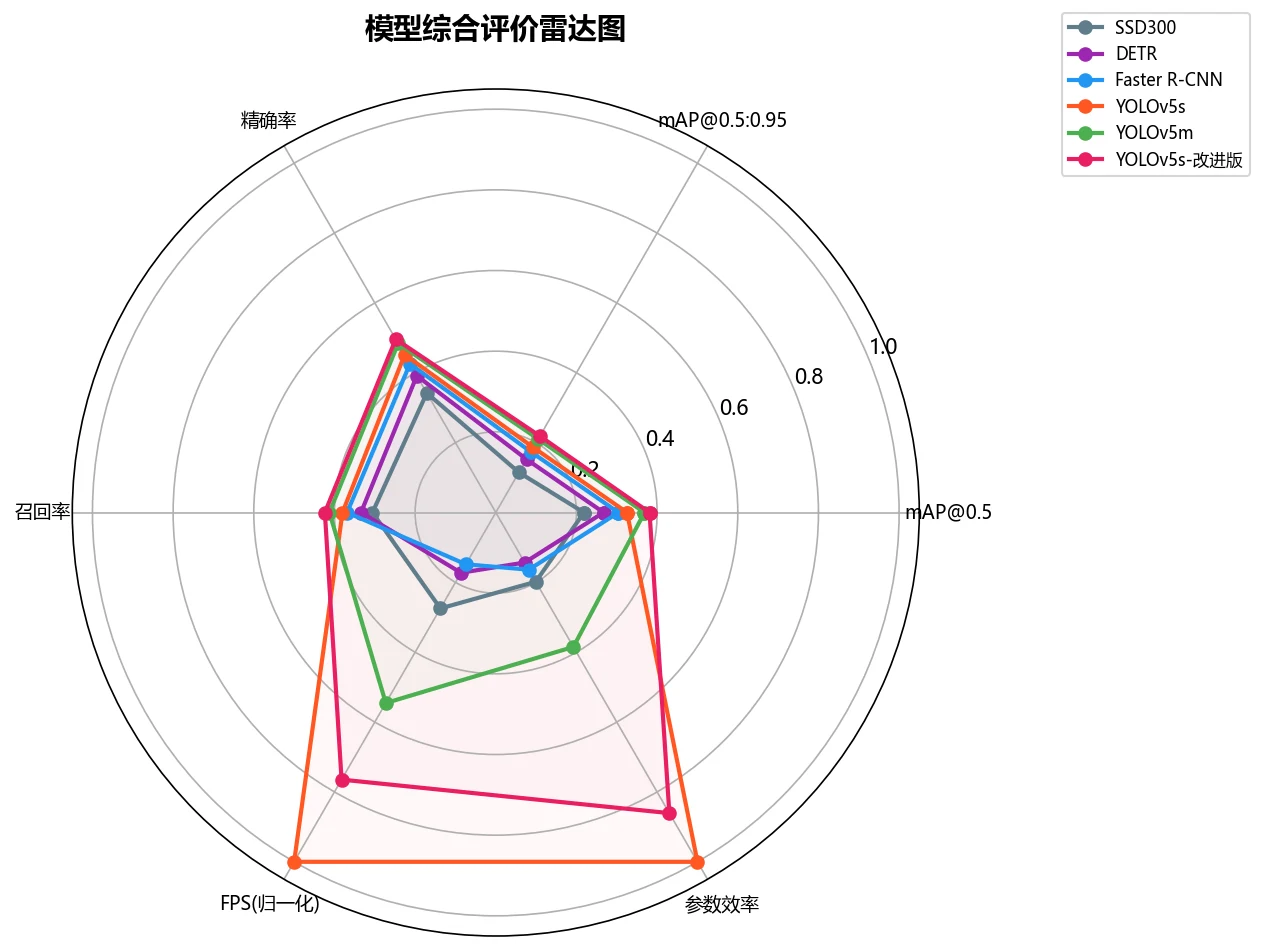
更关键的是,每张图怎么跑出来的、该怎么解读,技术文档里都讲清楚了——你能说明白每张图到底说明了什么。
面试官会问的,都帮你备好了
随便感受几个这个项目真实会被追问的问题:
- P2 层为什么能改善小目标检测?代价是什么?
- CBAM 为什么放在 Neck 而不是 Backbone?
- 单阶段(YOLO)和两阶段(Faster R-CNN)在航拍场景各有什么取舍?
看到会愣一下?正常。配套的面试问答文档把这个项目——从整体思路到每个流程细节、各种可能被追问的点——连参考答案都给你写好了。另外还有现成的简历描述,照着改就能写进简历;那套配图也能直接套进 PPT 模板,快速出一份面试 / 答辩 PPT。
配套资料:搞懂一个项目需要的,这里全都有
先看那份技术文档——从背景、YOLOv5 结构、三大改进一直讲到消融与对标,图文并茂:
代码也给你了——关键部分都带着中文注释,帮你读懂"它到底是怎么实现的":
技术文档、面试问答、源码注释、整套配图——搞懂一个项目、并在面试里讲清楚它,需要的全都备齐了。
适合谁
不管你是赶毕设、想给简历添个有分量的项目,还是在准备面试,这个题目都接得住。专业上,计算机、人工智能、自动化、无人机/遥感、电子信息方向都很合适。目标检测是计算机视觉最热门的落地方向之一,把这套改进思路真正搞懂、能讲出来,就是一个能写进简历、撑得起面试的项目。
想把这样的项目做成你简历上的亮点?
这是一套配齐了代码、文档、面试问答和配图的 AI+X 项目,可写进简历、在面试里讲清楚。 想做同类项目、或获取「基于 YOLOv5 的无人机航拍目标检测」的完整资料(代码 / 数据处理流程 / 论文文档 / 配图), 请联系为你介绍本页面的老师咨询,按你的情况定一个合适的项目。