在线刚度辨识与阻尼自适应的机器人柔顺抓取
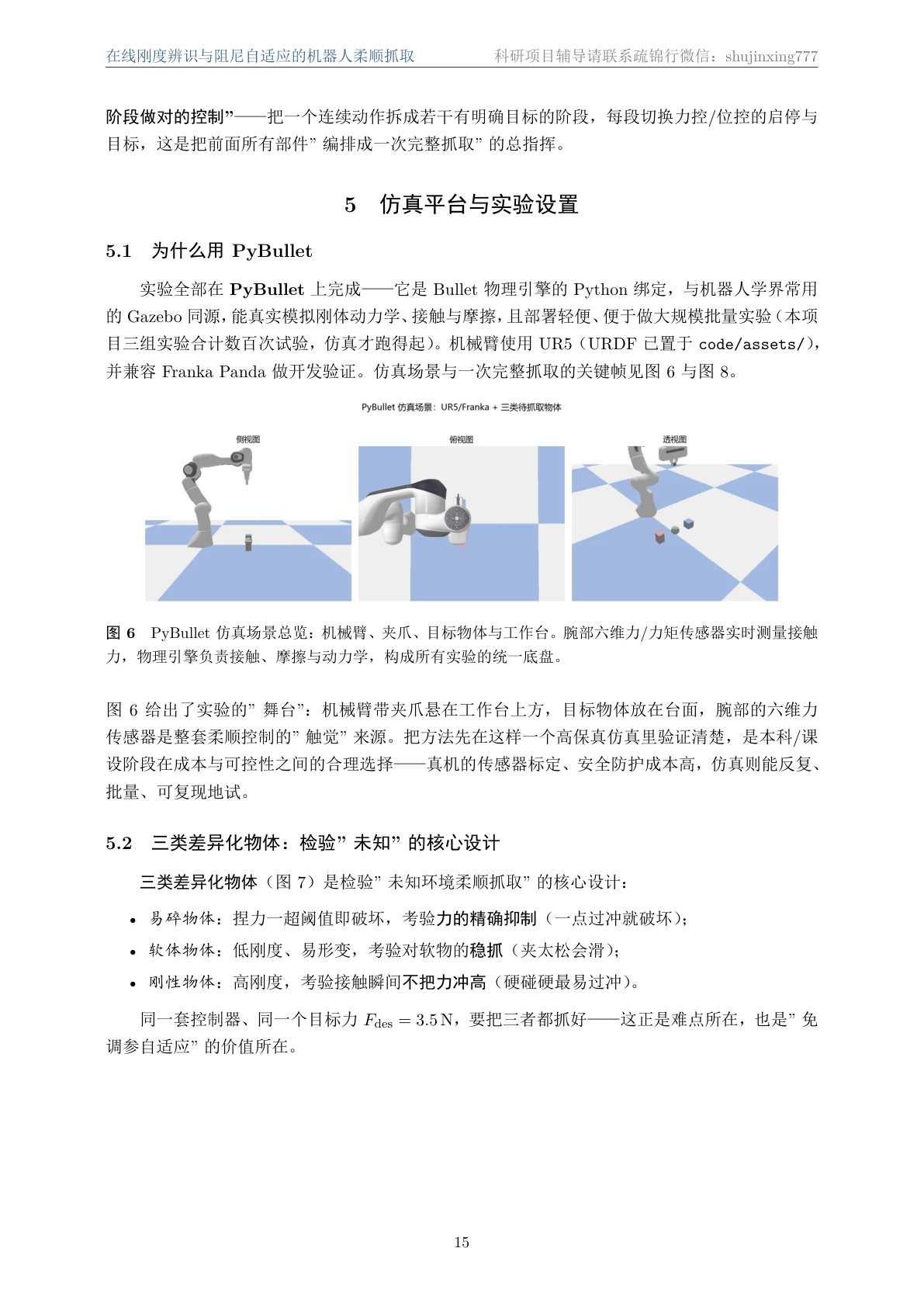
让机械臂像人手一样「感知到力就柔下来」——用六维力传感器实时感知接触力,在线辨识环境刚度并自适应调节阻尼,配合力-位混合控制,去抓易碎、软体、刚性等截然不同的未知物体而不捏坏、不打滑。PyBullet 仿真全流程,从控制框架到对比/消融/鲁棒性实验一应俱全。
项目亮点
- 基于 RLS 的环境刚度在线估计(带遗忘因子的多通道递推最小二乘)
- 基于刚度估计的阻尼自适应律(Lyapunov 稳定性证明)
- 任务空间选择矩阵的力-位解耦混合控制
- 阻抗-导纳双环柔顺控制框架
数据与任务
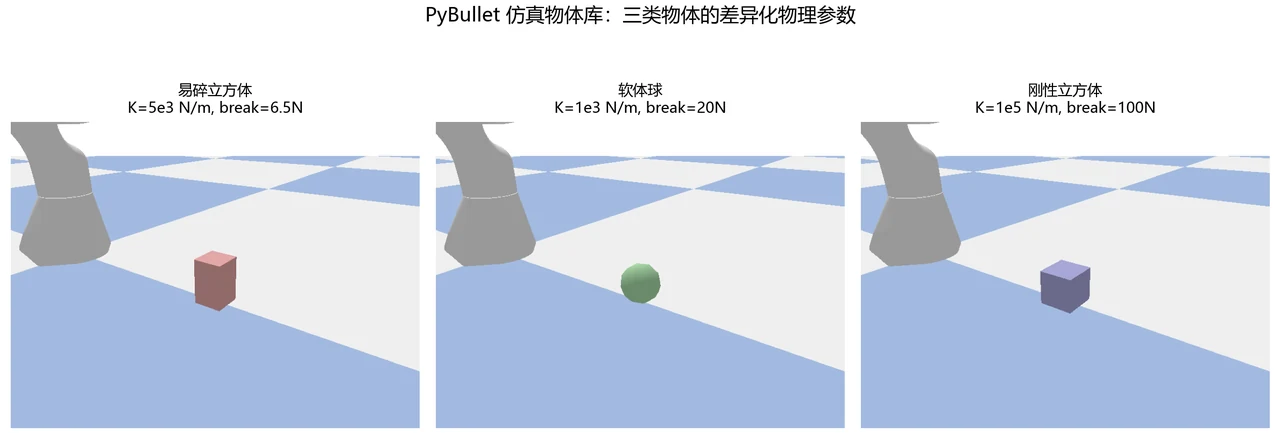
| 样本量 | PyBullet 仿真 · 易碎/软体/刚性三类物体 |
|---|---|
| 核心方法 | 力觉反馈柔顺控制 + RLS 刚度辨识 + 阻尼自适应 + 力-位混合 |
| 技术栈 | PyBullet · UR5/Franka · NumPy · SciPy |
如果你想找一个看起来就"很机器人"、又真有控制算法分量的项目,这个「力觉反馈柔顺抓取」很合适。
它的画面感和话题度都拉满——让机械臂去抓一个事先不知道软硬的物体:太用力会把鸡蛋捏碎,太松又会让球滑掉,关键是机器人要靠"手感"实时调整力道,而不是死板地按位置硬怼。配套也给你备齐了,帮你真正搞懂它、在面试和答辩里讲明白:带中文注释、能读懂的代码,一份从控制理论到仿真实验图文并茂的技术文档,里面连简历描述和会被追问的面试问题都连答案写好了,还有一整套能直接做 PPT 的配图。
先说清楚,它到底在做什么
任务是机器人领域的一个经典硬骨头——未知环境下的柔顺抓取。机械臂面对一个不知道软硬、不知道形状的物体,要在不把它捏坏、也不让它滑掉的前提下稳稳抓起来。难点在"未知"二字:传统做法是给定一条位置轨迹让夹爪照着走,可一旦物体比预想的硬,夹爪硬怼上去接触力瞬间飙升,鸡蛋就碎了;物体比预想的软,又抓不牢。
这个项目换了条路:不靠位置硬控,而是靠力觉反馈柔顺控制。机械臂带着一个六维力/力矩传感器,实时"摸"到自己和物体之间的接触力有多大,再据此动态调整手上的"软硬程度"——这正是柔顺控制(阻抗/导纳控制)的核心思想:让机器人在接触时表现得像一个可调的"弹簧+阻尼",而不是一根硬铁棍。
搞懂它,你能在面试里讲清楚什么
把下面几件事吃透,面试官顺着"力控/柔顺控制"这条线问下来你都能接得住。
柔顺控制到底柔在哪——力反馈怎么让机器人"软下来"。 这是整个项目的灵魂,也是和"按位置硬控"最不一样的地方。你要能讲清楚阻抗控制和导纳控制的区别与配合:让机器人在接触时像一个质量-弹簧-阻尼系统那样响应外力,接触力一大就主动退让,从而把抓取力稳稳控制在一个安全目标附近,而不是让它失控冲高。
面对未知物体,怎么"边抓边学"——环境刚度在线辨识。 物体软硬事先不知道,那就让机器人自己估。项目用带遗忘因子的递推最小二乘(RLS),从"位移变化"和"力变化"的关系里实时反推出物体的刚度——本质上是机器人一边接触一边在线辨识"我现在摸到的东西有多硬"。这是项目最有方法论含量的一招,也是让控制器能自适应的前提。
估出刚度之后怎么用——阻尼自适应让响应又稳又快。 光知道软硬还不够,关键是据此实时调整控制器的阻尼,让系统始终工作在临界阻尼附近:既不振荡、又响应快。项目这里还配了基于李雅普诺夫的稳定性论证,能讲清"为什么这么调系统不会发散",这是答辩时很加分的理论深度。
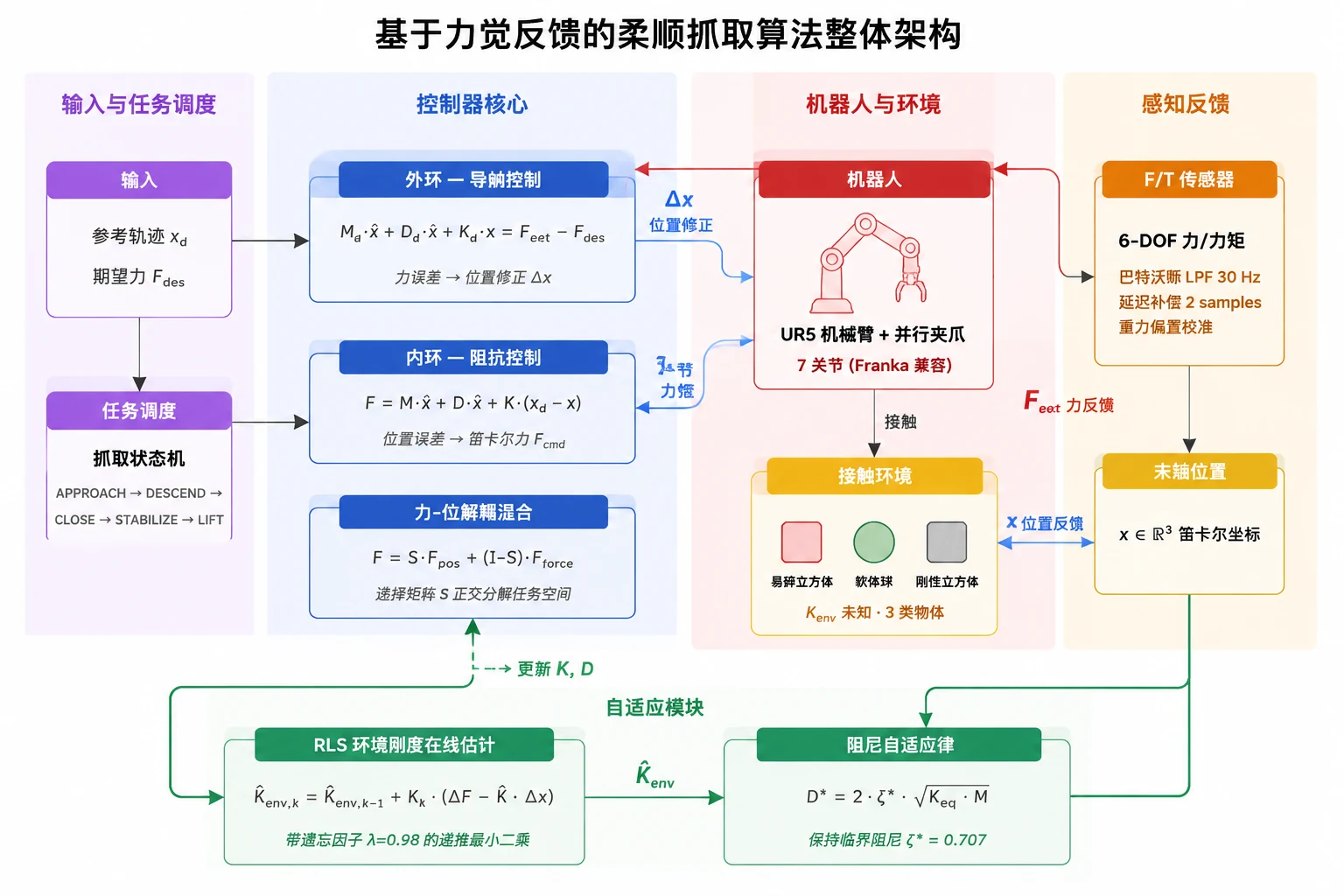
力控和位控怎么分工——任务空间力-位混合控制。 抓取时有的方向需要精确跟轨迹(位置控),有的方向需要稳住接触力(力控)。项目用一个"选择矩阵"把任务空间正交分解,让该控位的方向控位、该控力的方向控力,两者互不打架。你能借此讲清楚机器人控制里一个很经典也很实用的设计思想。
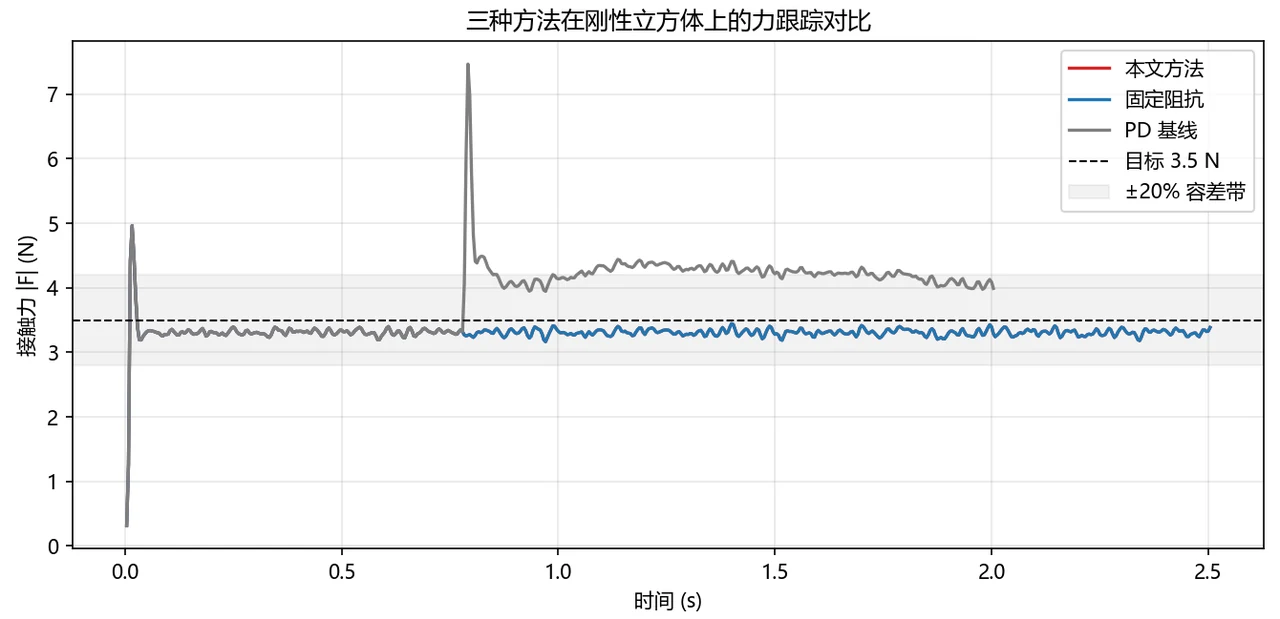
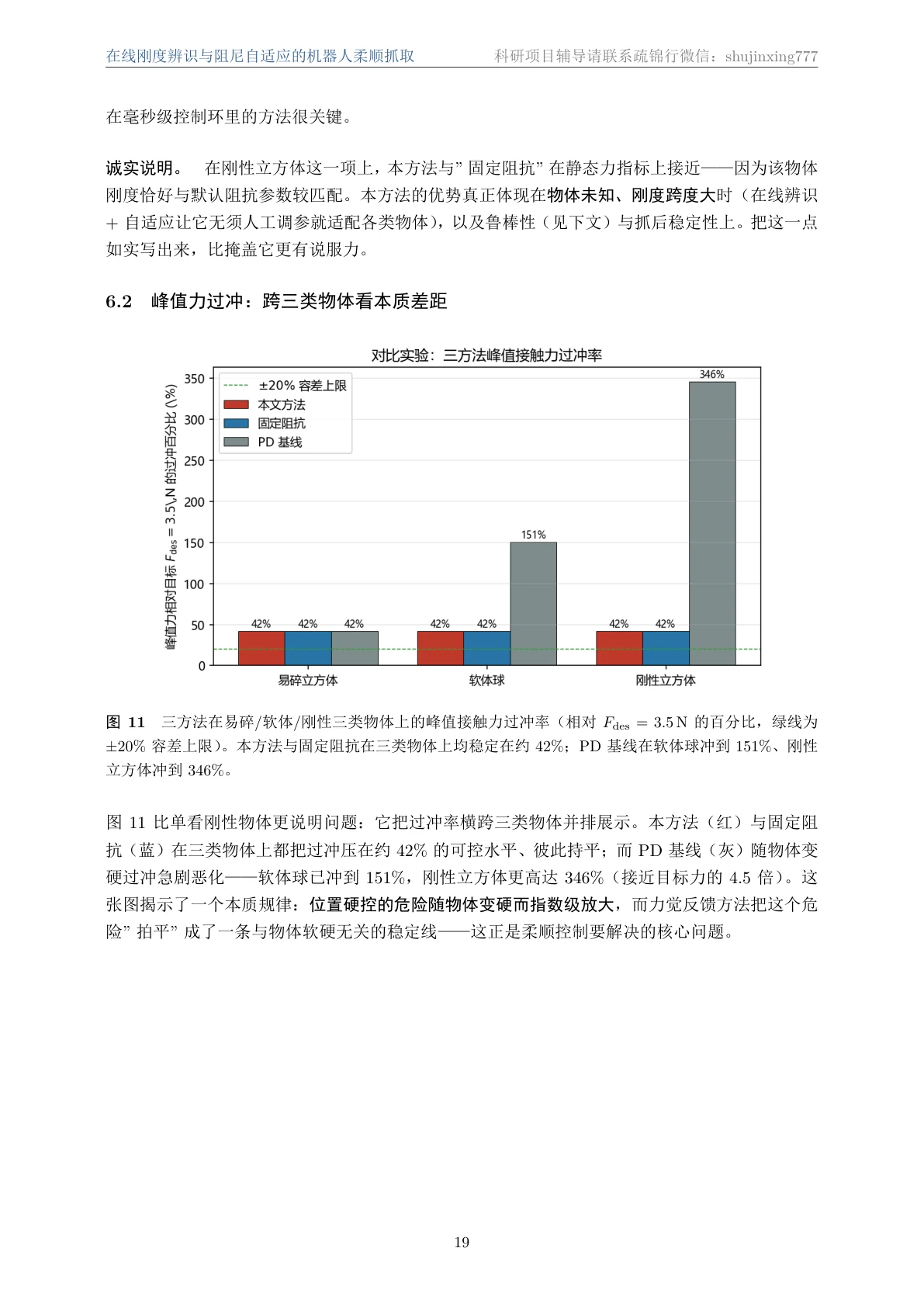
下面这张力跟踪对比图就是柔顺控制威力的直接证据——对照里能明显看到,柔顺方法把接触力稳稳压在目标线附近的安全容差带里,而不带力觉反馈的位置基线一接触就把力冲得老高(在易碎物体上这就是"捏碎"的瞬间):
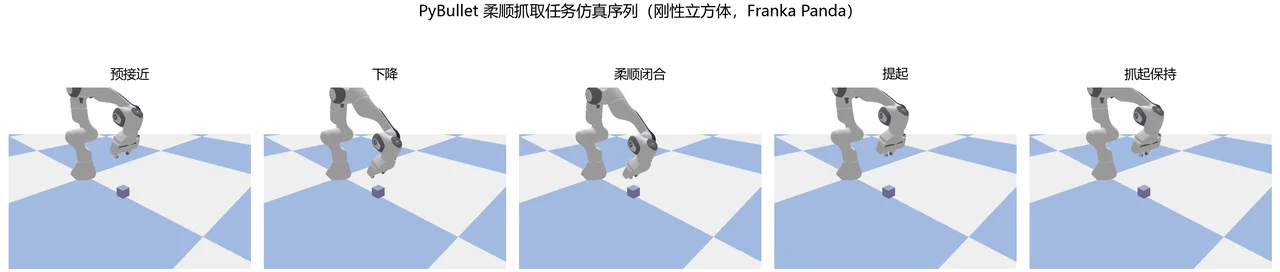
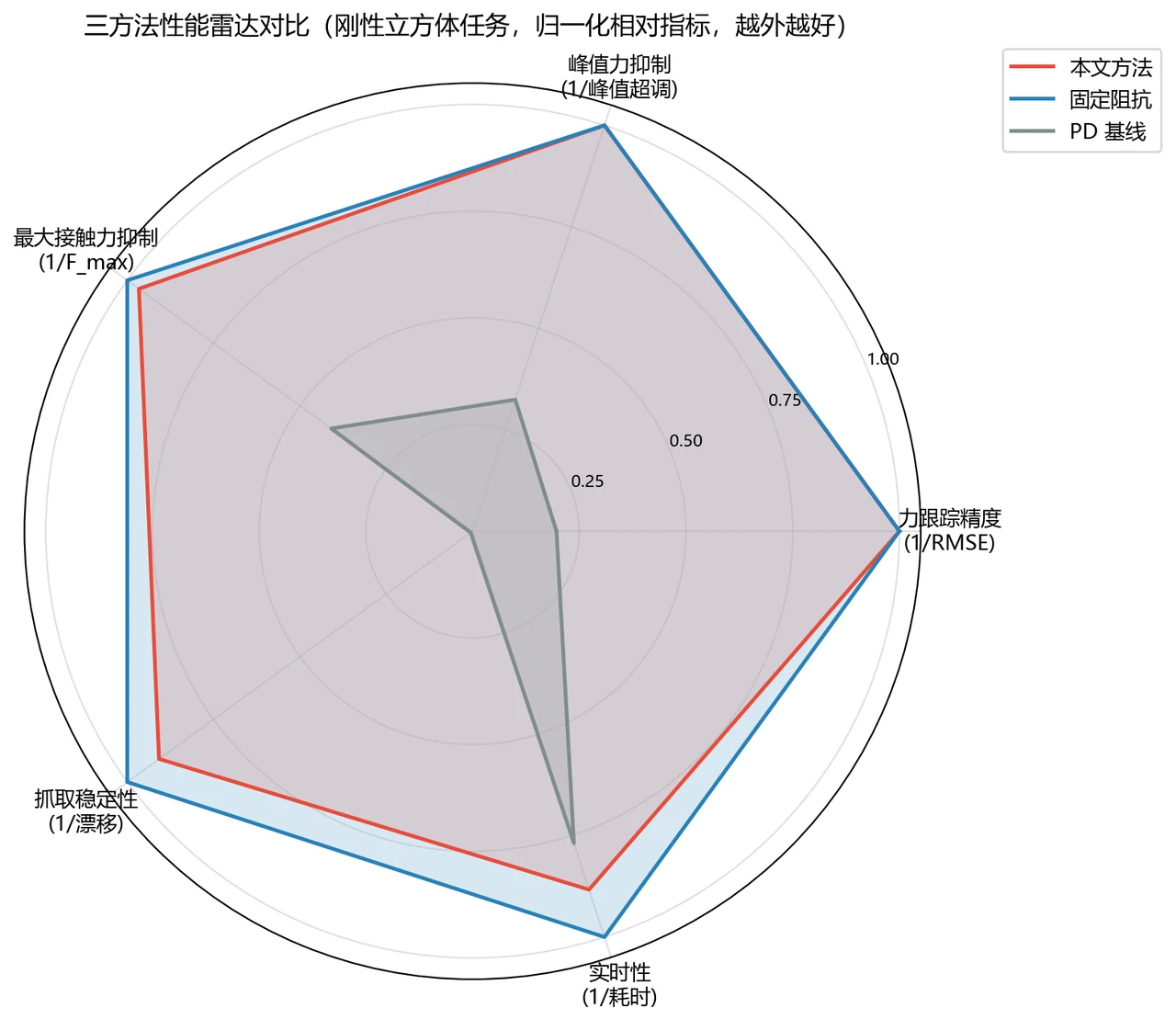
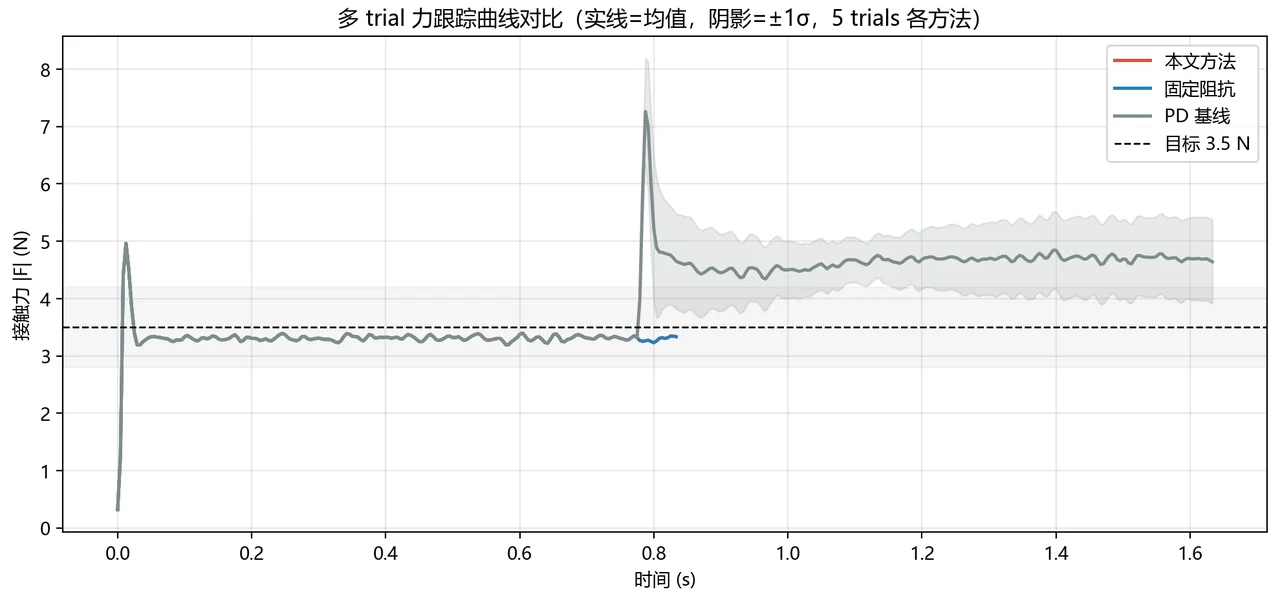
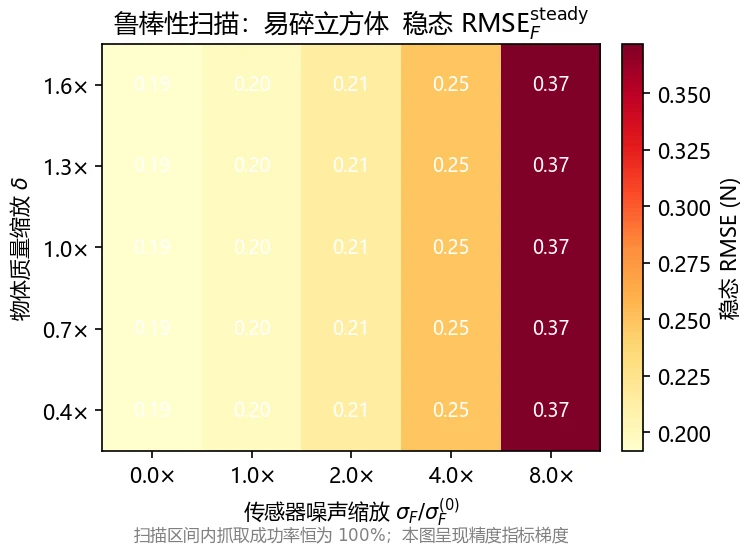
下面这组实验图也都给你做好了,可以直接放进答辩或面试 PPT:
更关键的是,每张图怎么跑出来的、该怎么解读,技术文档里都讲清楚了——你能说明白每张图到底说明了什么,而不只是把图贴上去。
面试官会问的,都帮你备好了
随便感受几个这个项目真实会被追问的问题:
- 阻抗控制和导纳控制有什么区别?你这套柔顺抓取为什么要把两者结合成双环?
- 物体软硬事先不知道,你是怎么在线估出环境刚度的?RLS 里的遗忘因子起什么作用?
- 估出刚度之后阻尼怎么调?你凭什么说调完之后系统是稳定的?
- 力-位混合控制里的"选择矩阵"是干嘛的?哪些方向控力、哪些方向控位,怎么定?
看到会愣一下?正常。配套的项目讲解资料把这个项目——从整体控制框架到每个算法细节、各种可能被追问的点——连参考答案都给你写好了,连柔顺控制、在线辨识、稳定性证明这些理论该怎么深入浅出地讲都帮你梳理好了。另外还有现成的简历描述,照着改就能写进简历;那套配图也能直接套进 PPT 模板,快速出一份面试 / 答辩 PPT。
配套资料:搞懂一个项目需要的,这里全都有
先看那份技术文档——从柔顺控制理论、环境刚度辨识、阻尼自适应一直讲到仿真平台搭建与对比/消融/鲁棒性实验,图文并茂、连理论推导都齐:
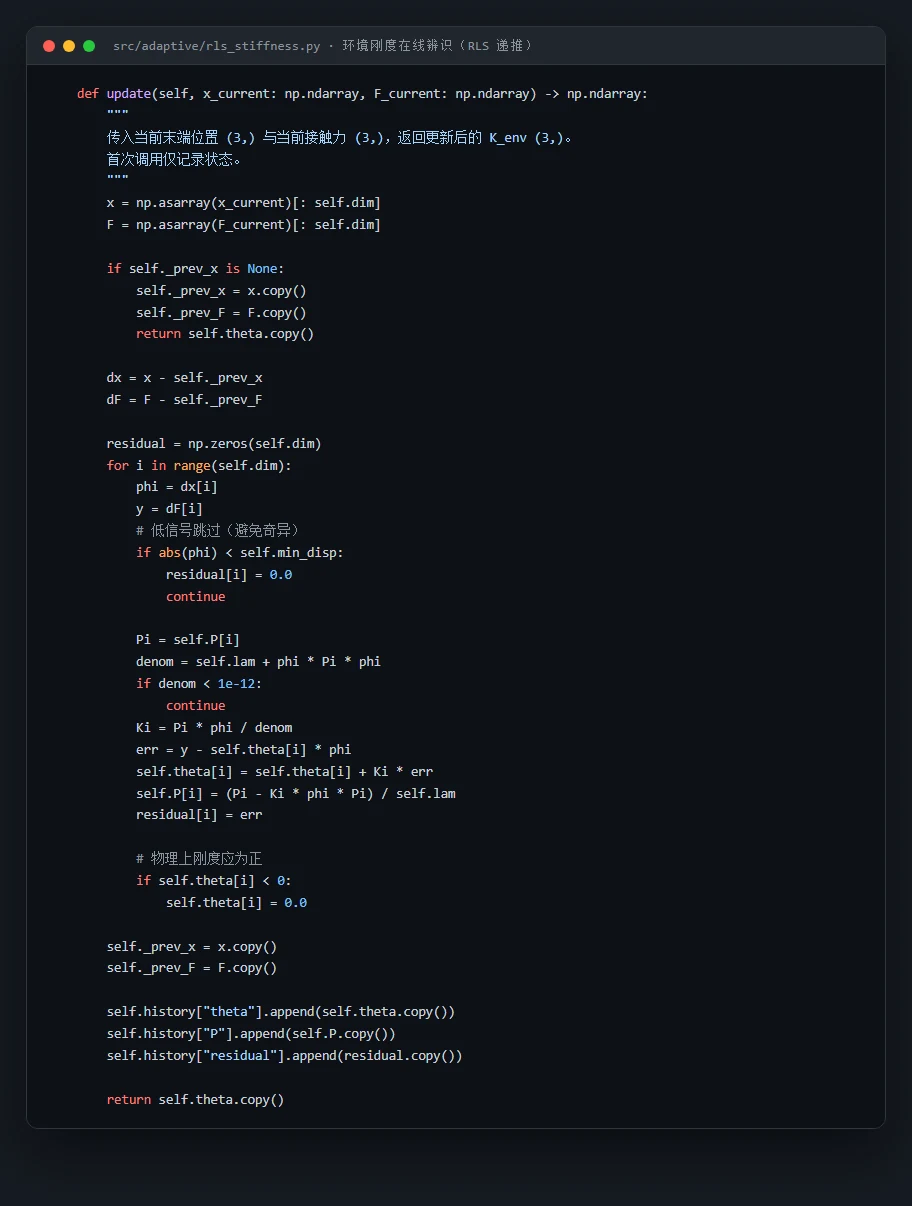
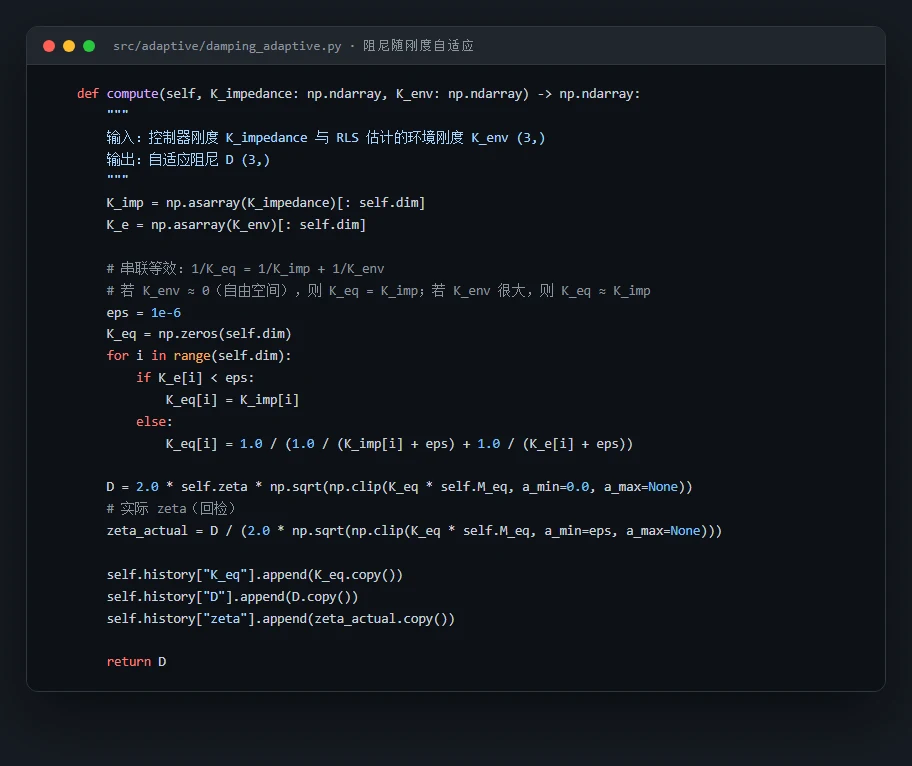
代码也给你了——关键部分都带着中文注释,帮你读懂"它到底是怎么实现的":左边是从力和位移里在线辨识环境刚度的 RLS 递推,右边是据此把阻尼自适应调到临界阻尼附近:
技术文档、项目讲解资料、源码注释、整套配图——搞懂一个项目、并在面试里讲清楚它,需要的全都备齐了。
适合谁
不管你是赶毕设、想给简历添个有硬核机器人味儿的项目,还是在准备面试,这个题目都接得住。专业上,计算机、人工智能、机械工程、工业工程、自动化、机器人方向都很合适——尤其是想往机器人控制、具身智能、自适应控制方向走的同学。把"力觉反馈柔顺控制怎么让机器人软下来、怎么对未知物体边抓边学在线辨识刚度、力和位怎么分工协同"这条完整链路真正搞懂、能讲出来,就是一个既有画面感、又有控制理论分量、撑得起面试的项目。
想把这样的项目做成你简历上的亮点?
这是一套配齐了代码、文档、面试问答和配图的 AI+X 项目,可写进简历、在面试里讲清楚。 想做同类项目、或获取「在线刚度辨识与阻尼自适应的机器人柔顺抓取」的完整资料(代码 / 数据处理流程 / 论文文档 / 配图), 请联系为你介绍本页面的老师咨询,按你的情况定一个合适的项目。