配置驱动的机械臂抓取仿真平台:从逆运动学到视觉引导抓取
在 PyBullet 物理引擎里搭起 Franka Panda 七自由度机械臂,让它看着桌面上的物块自己算抓取位姿、规划运动、抓起来再搬运堆叠——一条从视觉定位、逆运动学求解到抓取状态机的完整机械臂抓取仿真链路,还配了一套可切换视觉方案、可复跑的实验平台。
项目亮点
- 新的视觉定位方案
- 新的物体类型或场景
- Bug 修复和性能优化
数据与任务
| 核心方法 | 视觉定位 + 逆运动学 + 抓取/放置状态机 |
|---|---|
| 技术栈 | PyBullet · OpenCV · HSV · VLM · Python |
如果你想找一个又硬核又"看得见摸得着"的机器人方向项目,这个「机械臂抓取仿真」很合适。
它做的事一句话就能讲清楚,但底下全是真功夫——在物理仿真里让一台七自由度机械臂自己看物块、算位姿、规划运动,把物块抓起来再搬过去堆好。配套也给你备齐了,帮你真正搞懂它、在面试和答辩里讲明白:带中文注释、能读懂的代码,一套讲透"视觉怎么定位、机械臂怎么算关节角、抓取怎么一步步执行"的图文文档,连简历描述和会被追问的面试问题都连答案写好了,还有一整套能直接做 PPT 的流程图与仿真截图。
先说清楚,它到底在做什么
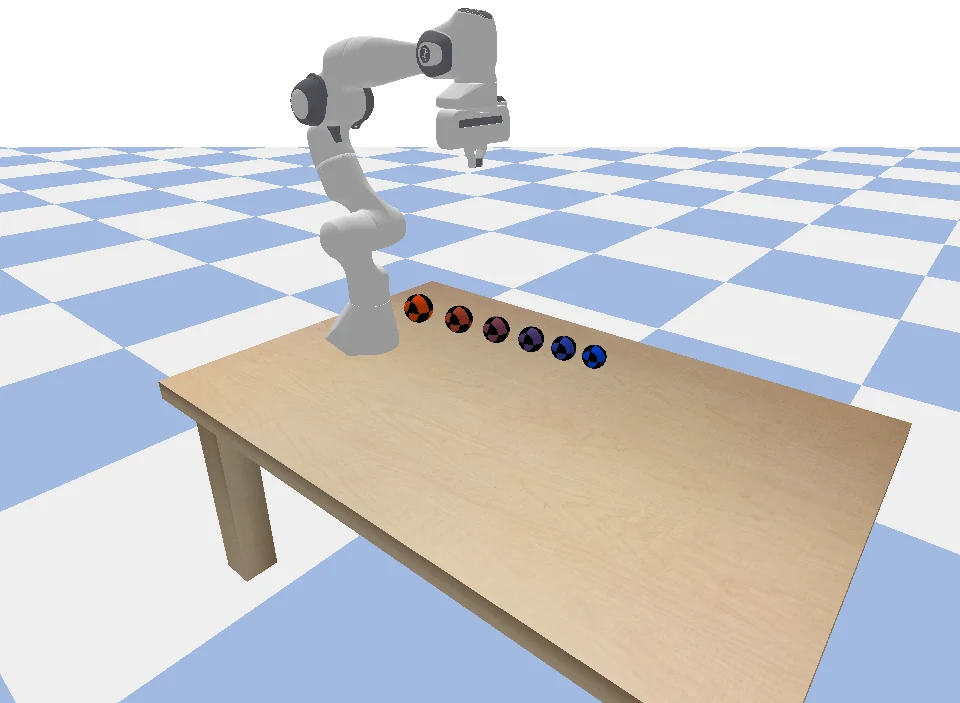
任务本身很直观:桌面上摆着几个物块,机械臂要逐个把它们抓起来、搬到目标点、堆成一摞。但要让这件"人手随便就能干"的事在机器上跑通,背后是一整条流水线——先用相机"看清"每个物块在哪、该从什么角度下手,再把这个抓取位姿翻译成机械臂七个关节各自该转多少度,然后驱动机械臂一步步接近、下降、闭合夹爪、抬升、搬运。整个过程跑在 PyBullet 物理引擎里,带真实的碰撞、夹爪力控和重力,所以"抓得稳不稳、堆得倒不倒"都是物理算出来的,不是动画摆拍。
下面这张图就是一次完整抓取的五个关键画面——从夹爪移到物块上方,到下降、闭合、抬起、放到目标位置,一气呵成:

搞懂它,你能在面试里讲清楚什么
把下面几件事吃透,面试官顺着"机器人 / 机械臂"这条线问下来你都能接得住。
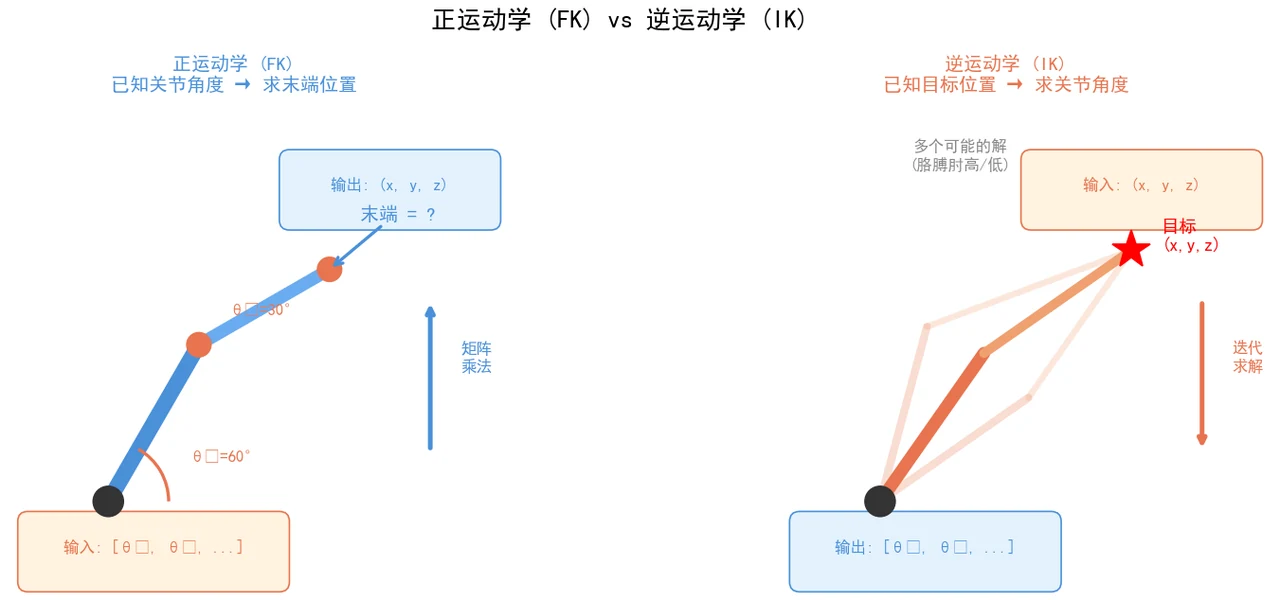
抓取位姿是怎么求出来的——逆运动学这道坎你得迈过去。 这是整个项目的内核,也是机械臂区别于"普通写程序"最不一样的地方。你要能讲清楚正运动学和逆运动学的区别:已知关节角度求末端在哪很简单,而我们要的是反过来——已知"想让夹爪到达哪个位姿",反解出七个关节各自该转到什么角度,而且这个解往往不唯一(手肘可高可低)。项目正是靠逆运动学把"我想抓这里"翻译成机械臂能执行的关节指令。
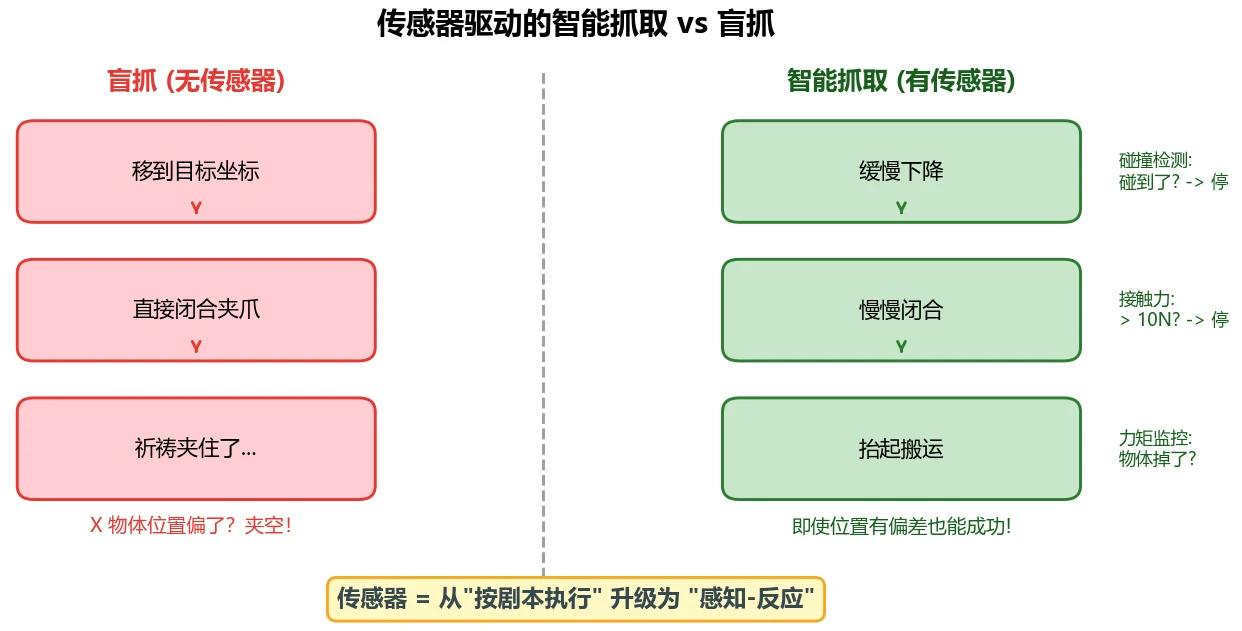
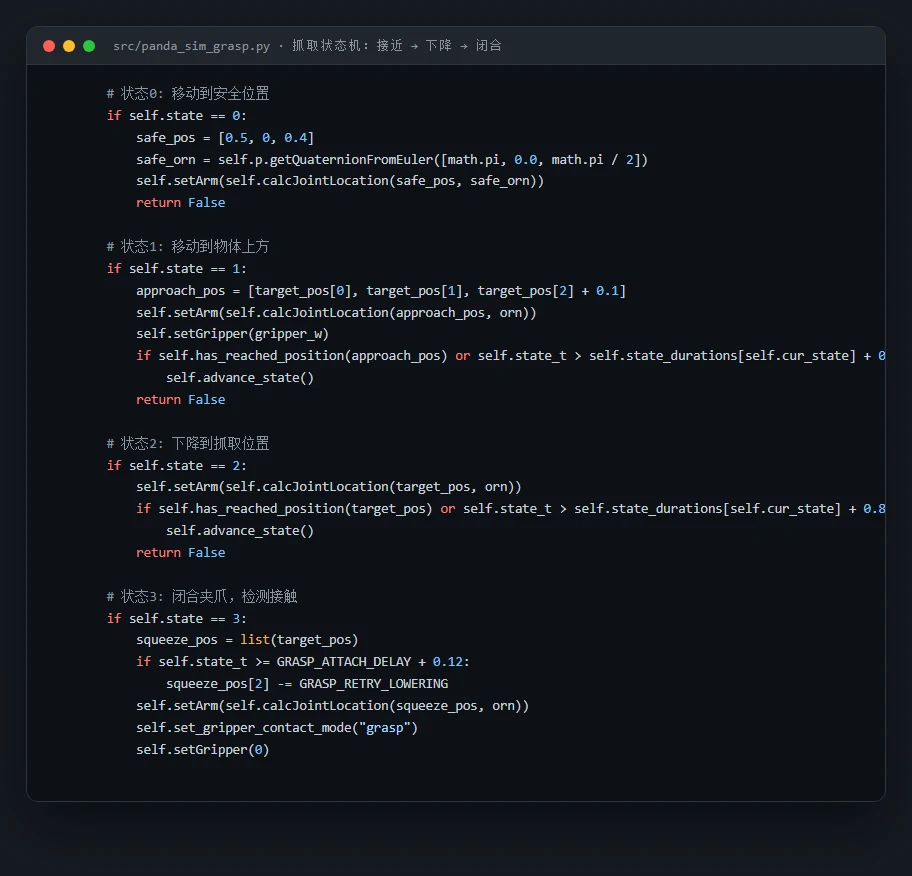
一次抓取不是一个动作,而是一台状态机。 "把物块抓起来"在代码里被拆成了一串有先后、有判断的状态:接近物块上方 → 垂直下降到抓取高度 → 闭合夹爪并检测接触 → 抬升 → 搬运,放置时再走一套接近-下降-稳定-释放-撤退。你能借此讲清楚一个很有分量的工程思想——机器人的动作要靠状态机来组织,每一步都带条件判断和兜底,而不是把一串指令硬写死。这正是真实机器人控制的样子。
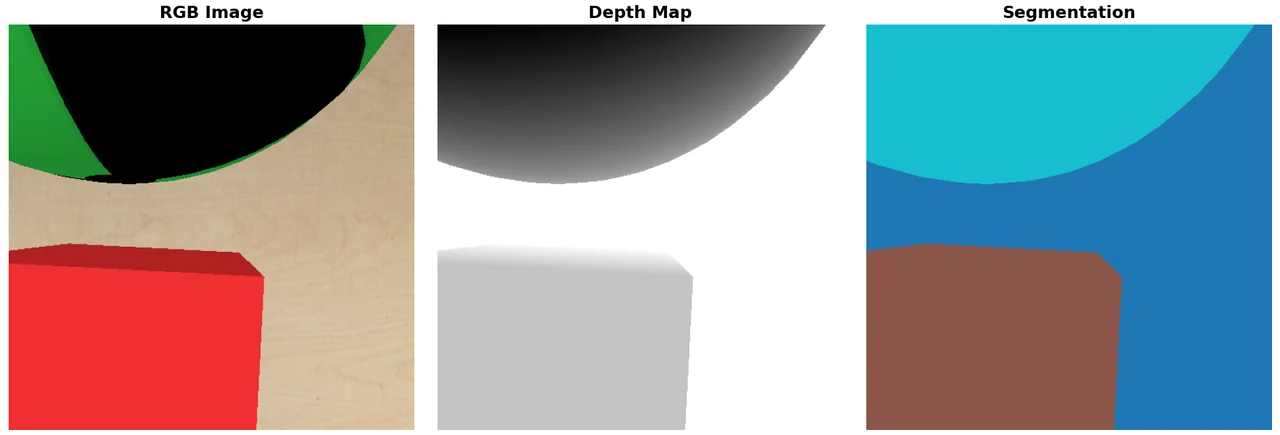
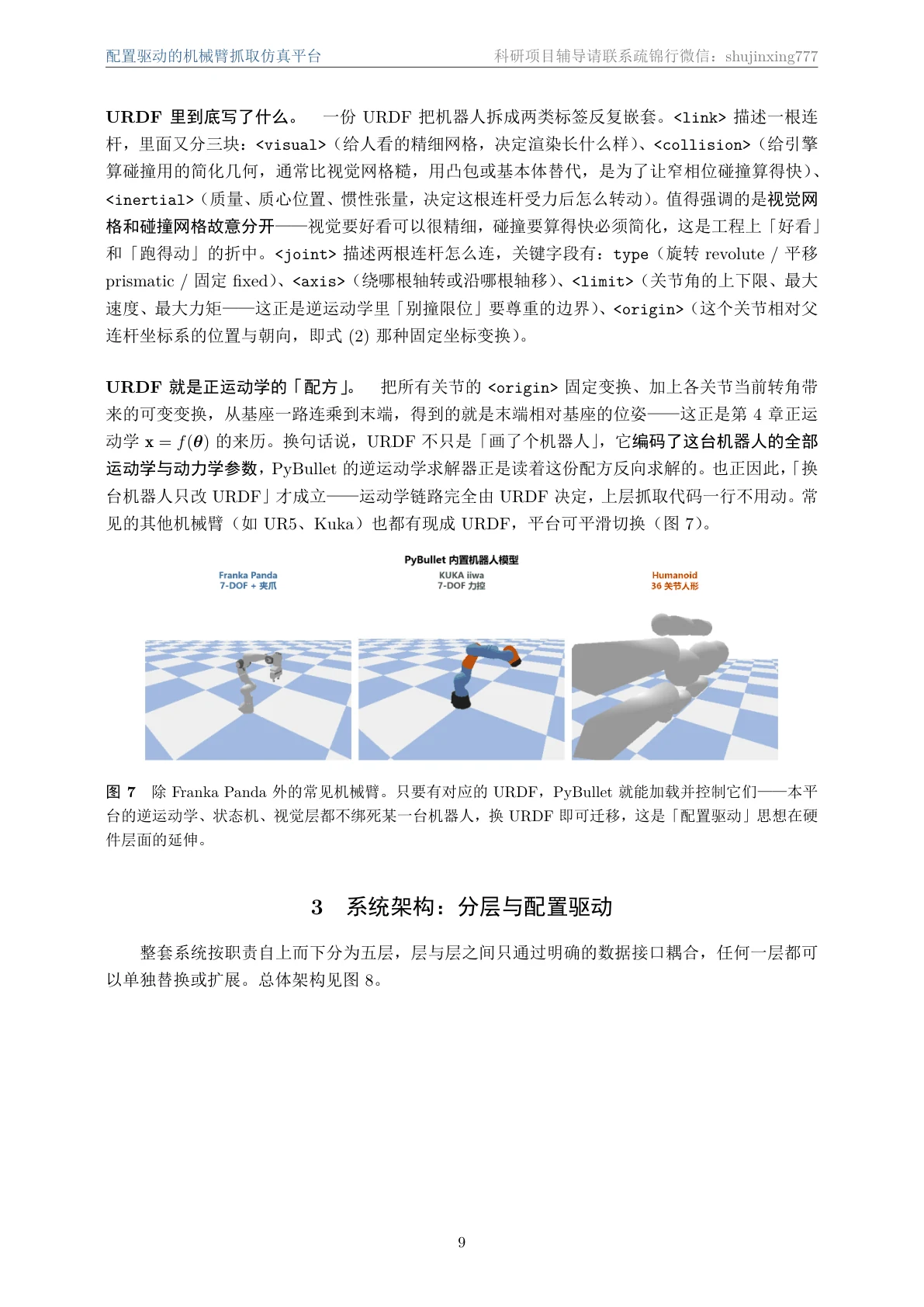
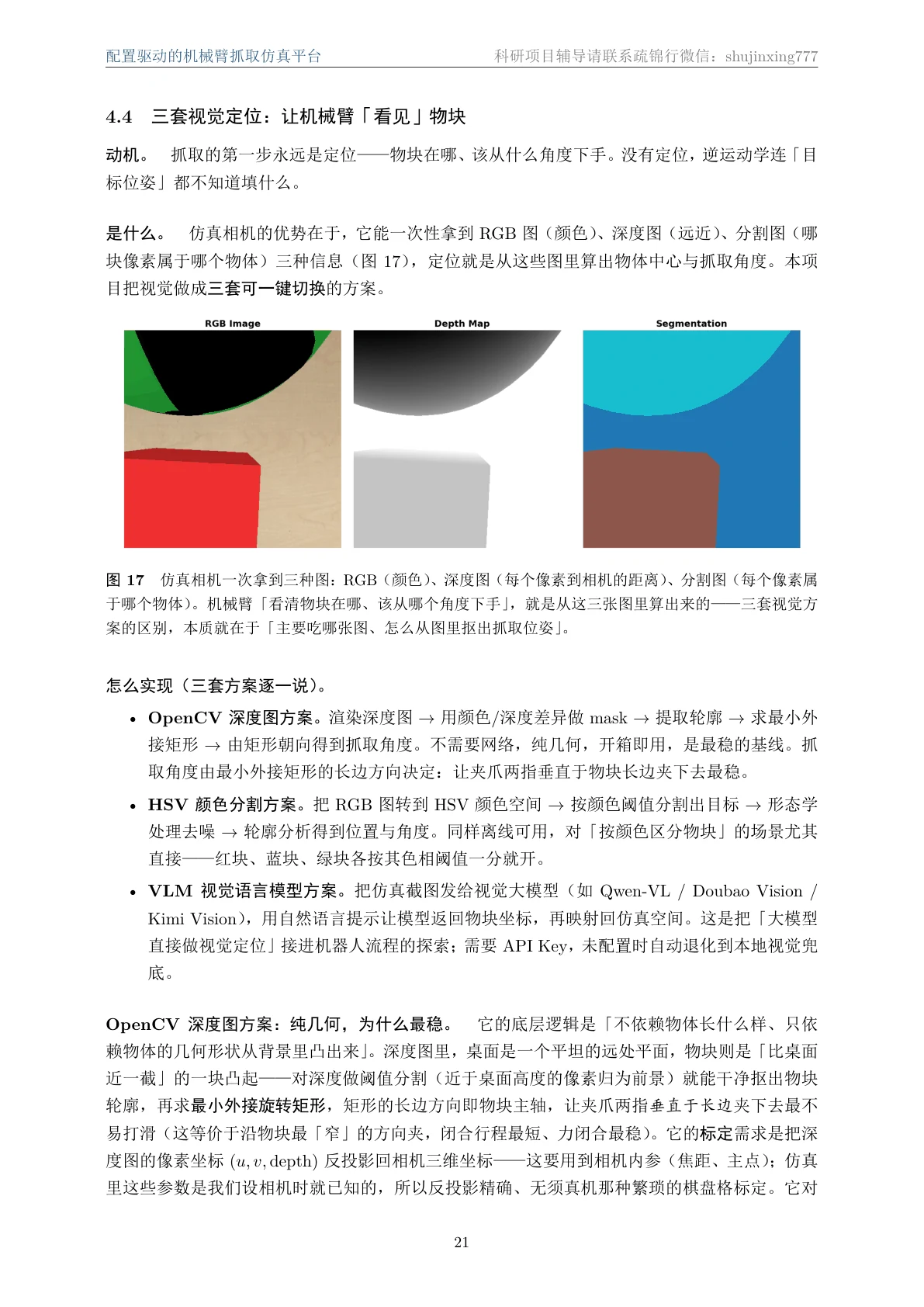
机械臂怎么"看见"物块——视觉定位这一环也讲得明明白白。 项目把视觉做成了可切换的三套方案:基于深度图的 OpenCV 检测、基于颜色的 HSV 分割,以及调用视觉大模型的 VLM 定位。你能借此讲清楚机器人视觉最基础的一课——仿真相机能同时拿到 RGB 图、深度图和分割图,从这三种信息里就能算出物块的中心位置和该用什么角度去抓。
这套机械臂抓取仿真的场景与轨迹图也都给你做好了,可以直接放进答辩或面试 PPT:
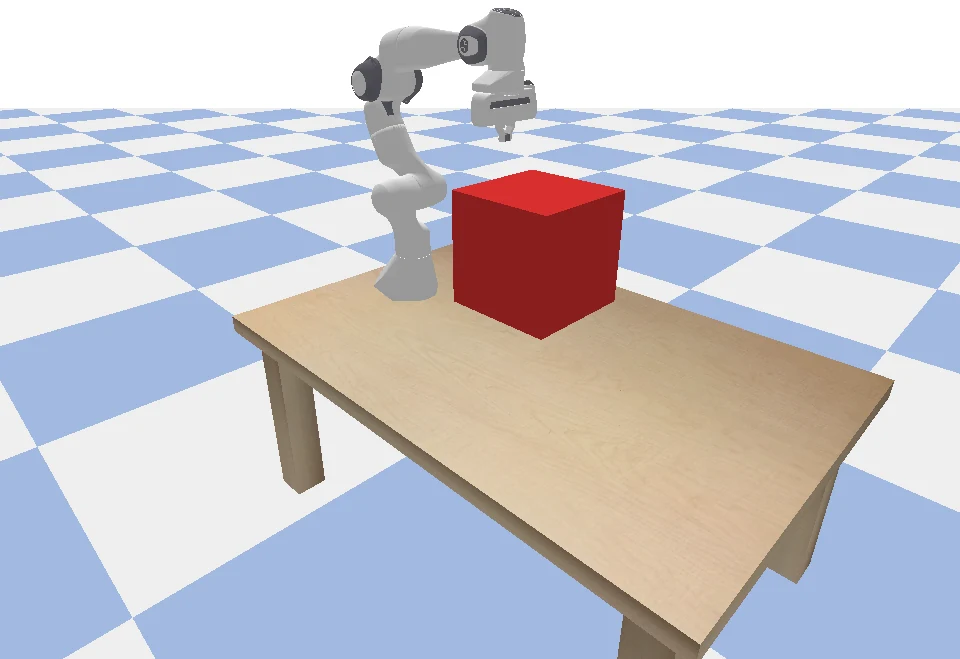

更关键的是,每张图对应代码里的哪一步、该怎么解读,文档里都讲清楚了——你能说明白每张图到底说明了什么,而不只是把图贴上去。
面试官会问的,都帮你备好了
随便感受几个这个项目真实会被追问的问题:
- 你是怎么把"想让夹爪到达某个位姿"反解成机械臂关节角度的?逆运动学的解为什么不唯一?
- 一次抓取动作在你代码里被拆成了哪几个状态?为什么要用状态机而不是顺序执行?
- 夹爪闭合时你怎么判断"已经抓稳了"?抓空或抓偏了怎么兜底?
- 同一套抓取流程,OpenCV、HSV、VLM 三种视觉定位你觉得各自强在哪、弱在哪?
看到会愣一下?正常。配套的项目讲解资料把这个项目——从整体架构到视觉定位、逆运动学、抓取状态机每个环节,到各种可能被追问的点——连参考答案都给你写好了,连"为什么用状态机""三种视觉方案怎么取舍"这类硬问题该怎么讲都帮你梳理好了。另外还有现成的简历描述,照着改就能写进简历;那套流程图与仿真截图也能直接套进 PPT 模板,快速出一份面试 / 答辩 PPT。
配套资料:搞懂一个项目需要的,这里全都有
先给你一份十几页的中文技术文档——从系统分层架构、配置驱动设计,一路讲到逆运动学求解、抓取状态机、三套视觉定位,再到仿真实验,每一张图对应代码里的哪一步、该怎么解读都写清楚了,连面试问答和简历描述都附在里头:
代码也给你了——关键部分都带着中文注释,帮你读懂"它到底是怎么实现的":左边是把抓取位姿反解成关节角度的逆运动学,右边是抓取状态机里"接近→下降→闭合"那段控制流:

更省心的是,整套抓取流程由配置文件驱动——换视觉方案、换物体、换实验组都只改 JSON,不用动代码,当成一个能反复跑、好讲解的实验平台正合适。架构图、流程图、源码注释、整套仿真截图——搞懂一个项目、并在面试里讲清楚它,需要的全都备齐了。
适合谁
不管你是赶毕设、想给简历添个有"机器人"含量的硬核项目,还是在准备面试,这个题目都接得住。专业上,计算机、人工智能、机械工程、自动化、机器人工程、工业工程方向都很合适——尤其是想往机器人控制、机械臂、具身智能、机器人视觉方向走的同学。把"机械臂怎么看见物块、怎么求抓取位姿、怎么靠状态机一步步抓起来搬过去"这条完整链路真正搞懂、能讲出来,就是一个既有工程分量、又撑得起面试的项目。
想把这样的项目做成你简历上的亮点?
这是一套配齐了代码、文档、面试问答和配图的 AI+X 项目,可写进简历、在面试里讲清楚。 想做同类项目、或获取「配置驱动的机械臂抓取仿真平台:从逆运动学到视觉引导抓取」的完整资料(代码 / 数据处理流程 / 论文文档 / 配图), 请联系为你介绍本页面的老师咨询,按你的情况定一个合适的项目。